機体紹介
ここでは直近の大会に出場した機体(ロボット)について紹介します
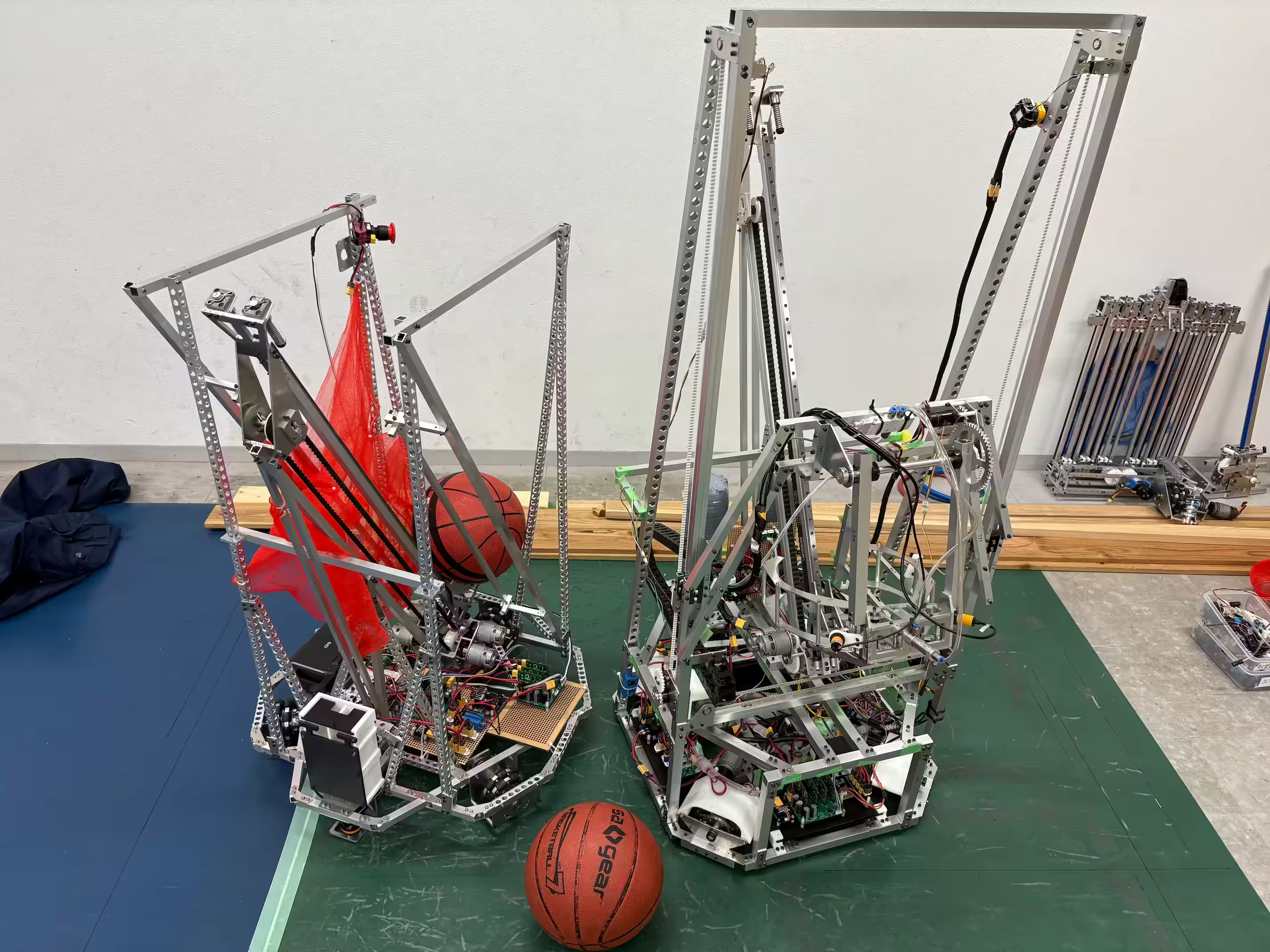
NHK学生ロボコン2025 本選出場 「R1&R2」
開催日
2025/6/8 @大田区総合体育館 (東京都大田区)
製作者
22, 23年度入部生
コンセプト
ドリブル&シュートが可能なR1とシュートのみ可能な軽量R2の2機
LiDARでの初期位置調整と接地エンコーダーを用いた自己位置推定によりシュートの角度や強度を自動調整
主要スペック
- 駆動方式: 4輪オムニホイール
- 制御: STM32+ESP32+PC
- 主な使用技術: ベル直, 自己位置推定, ROS2, Wi-Fiを用いた通信など
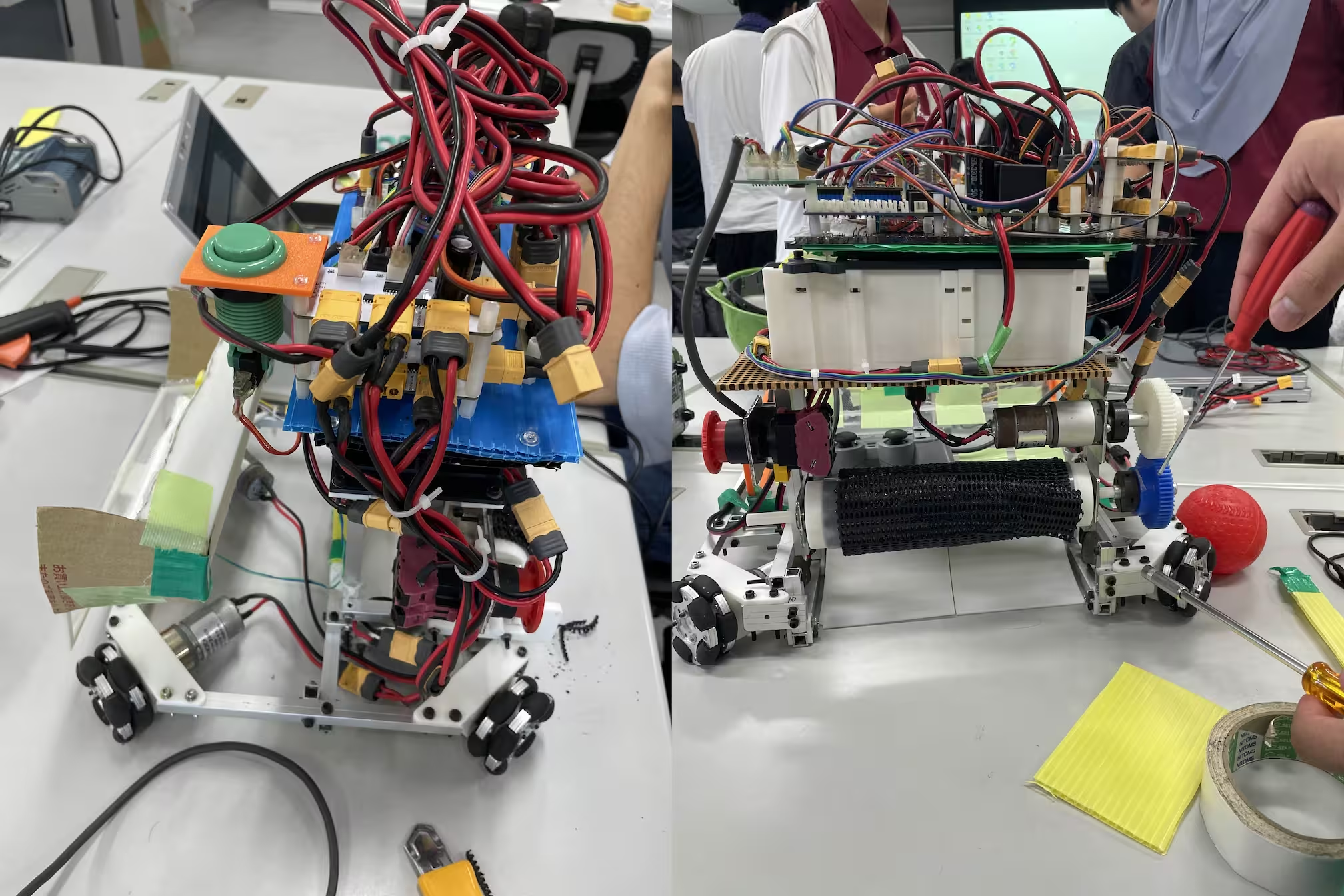
九州夏ロボコン2025 4位 「信長&秀吉」
開催日
2025/8/30 @九州大学伊都キャンパス (福岡県福岡市)
製作者
25年度入部生
コンセプト
ボール回収&移動を自動で行う信長とボール回収&射出を手動で行う秀吉の2機
主要スペック
- 駆動方式: 4輪オムニホイール
- 制御: mbed
- 主な使用技術: CAN通信, PID制御など
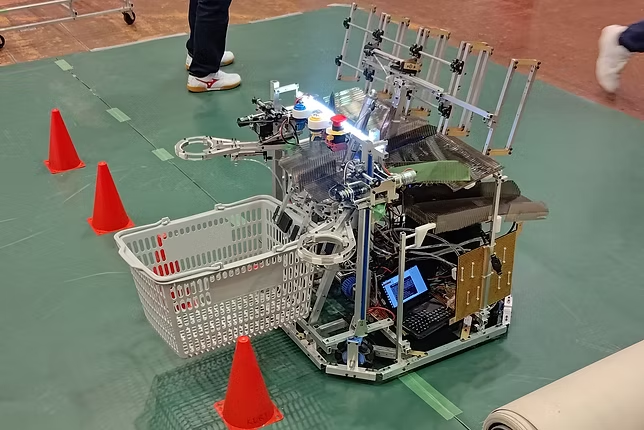
第15回キャチロボバトルコンテスト ベスト8 「クイックアソート」

開催日
2025/9/21 @国立京都国際会館 (京都府京都市)
製作者
24年度入部生
コンセプト
機構をコンパクトにし高速旋回&ワーク吸着を目指す
主要スペック
- 制御: STM32+PC
- 主な使用技術: 自己位置推定, ROS2, Wi-Fiを用いた通信など
関西春ロボコン2025 ベスト16 「RoDen」
開催日
2025/3/13 @道の駅ガレリアかめおか (京都府亀岡市)
製作者
24年度入部生
コンセプト
全ての機構を自動制御で行うことを念頭に設計
主要スペック
- 駆動方式: 4輪オムニホイール
- 制御: mbed+PC
- 主な使用技術: 自己位置推定, ROS2, Wi-Fiを用いた通信など
技術的な取り組み
ハード設計
3D CAD (Inventor, Fusion) を用いて、部品設計から機体全体の構造設計まで行います。
制御
C++やPythonを使い、マイクロコントローラ(STM32, ESP32)を制御。PID制御などを用いてセンサー情報に基づいたロボットの動きを制御します。
加工
3DプリンターやCNCフライス盤などを利用して、設計した部品を誤差なく加工します。
回路設計・製作
モーターを動かすドライバ基板や、センサー情報を処理する制御基板などを、自分たちで設計・製作します。